 Schemat rozwiązań konstrukcyjnych elementów poprzecznych układów nośnych hal stalowych.
Schemat rozwiązań konstrukcyjnych elementów poprzecznych układów nośnych hal stalowych.
W budynkach halowych o rzucie w kształcie wydłużonego prostokąta stosuje się najczęściej poprzeczne ustroje nośne, które są rozmieszczone prostopadle do osi podłużnej obiektu. Mimo iż jest to budowla przestrzenna, takie ukształtowanie konstrukcji umożliwia w wielu przypadkach obliczanie jej jako ustroju płaskiego na podstawie analizy wytężenia powtarzalnego nośnego układu poprzecznego. Uzyskuje się w ten sposób wystarczająco dokładne informacje o wytężeniu ustroju, bez konieczności analizy sił wewnętrznych przestrzennej konstrukcji hali. W uzasadnionych przypadkach, np. gdy jest celowe uwzględnienie współdziałania ustrojów sąsiednich w przenoszeniu obciążeń, należy siły wewnętrzne wyznaczać, przyjmując przestrzenny schemat konstrukcji hali. Taką analizę umożliwiają współcześnie dostępne programy komputerowe. Stosowanie płaskich układów nośnych w halach jest najbardziej rozpowszechnione ze względu na jednorodność wytwarzania elementów ich konstrukcji, a także łatwość montażu i transportu. Rozwiązania taicie stosuje się zarówno w obiektach jedno-, jak i wielonawowych o jednakowych i różnych wysokościach naw.
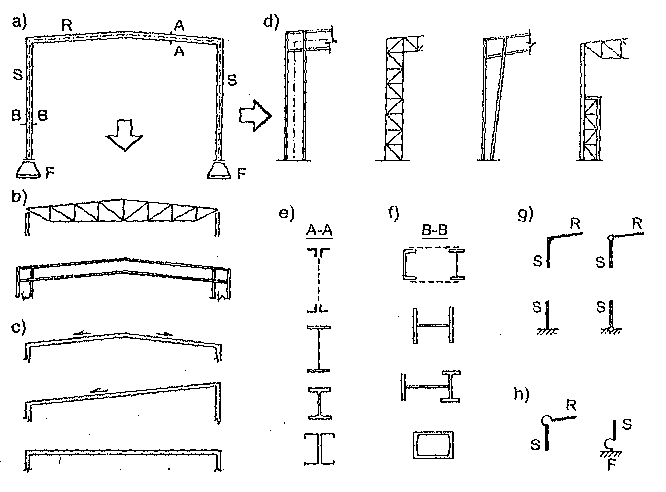
Schemat rozwiązań konstrukcyjnych elementów poprzecznych układów nośnych hal pokazano na rysunku. W płaskich poprzecznych ustrojach nośnych hali (rysunek a) można wyróżnić rygle dachowe R i słupy główne S. Konstrukcje tych elementów mogą być pełnościenne (blachownicowe i z kształtowników walcowanych na gorąco lub giętych na zimno), a także kratownicowe (rysunek a, b, d, e, f). Rygle dachowe ustrojów nośnych mogą być jedno- lub dwuspadkowe, a w przypadku dachów szedowych — bez spadków (rysunek c). Słupy główne hal mogą być o stałej lub zmiennej liniowo albo skokowo sztywności (rysunek d). W obiektach wielonawowych wysokości słupów mogą być takie same lub różne.
Rygle R ze słupami S oraz słupy S z fundamentami F mogą być połączone (rysunek g) w sposób sztywny (przenosząc momenty zginające M nie mniejsze niż nośność łączonych elementów MR) lub przegubowy (przenosząc siły osiowe i poprzeczne). Mogą to być również tzw. połączenia podatne tych elementów (rysunek h), zdolne do przenoszenia momentów zginających M < Mu.